
Dongheon Lee
Autonomous Systems Research Engineer
Master’s student working on UAV systems, multi-agent coordination, and end-to-end autonomous algorithms
📍 West Lafayette, IN, U.S.A.
Autonomous Systems Research Engineer
Master’s student working on UAV systems, multi-agent coordination, and end-to-end autonomous algorithms
📍 West Lafayette, IN, U.S.A.
Skills and technologies I work with
Building autonomous UAV systems from simulation to real-world deployment
Developing robust software for robotics and embedded systems
Applying ML and CV to robotics and sensing applications
Integrating custom hardware for autonomous systems
Featured work and projects
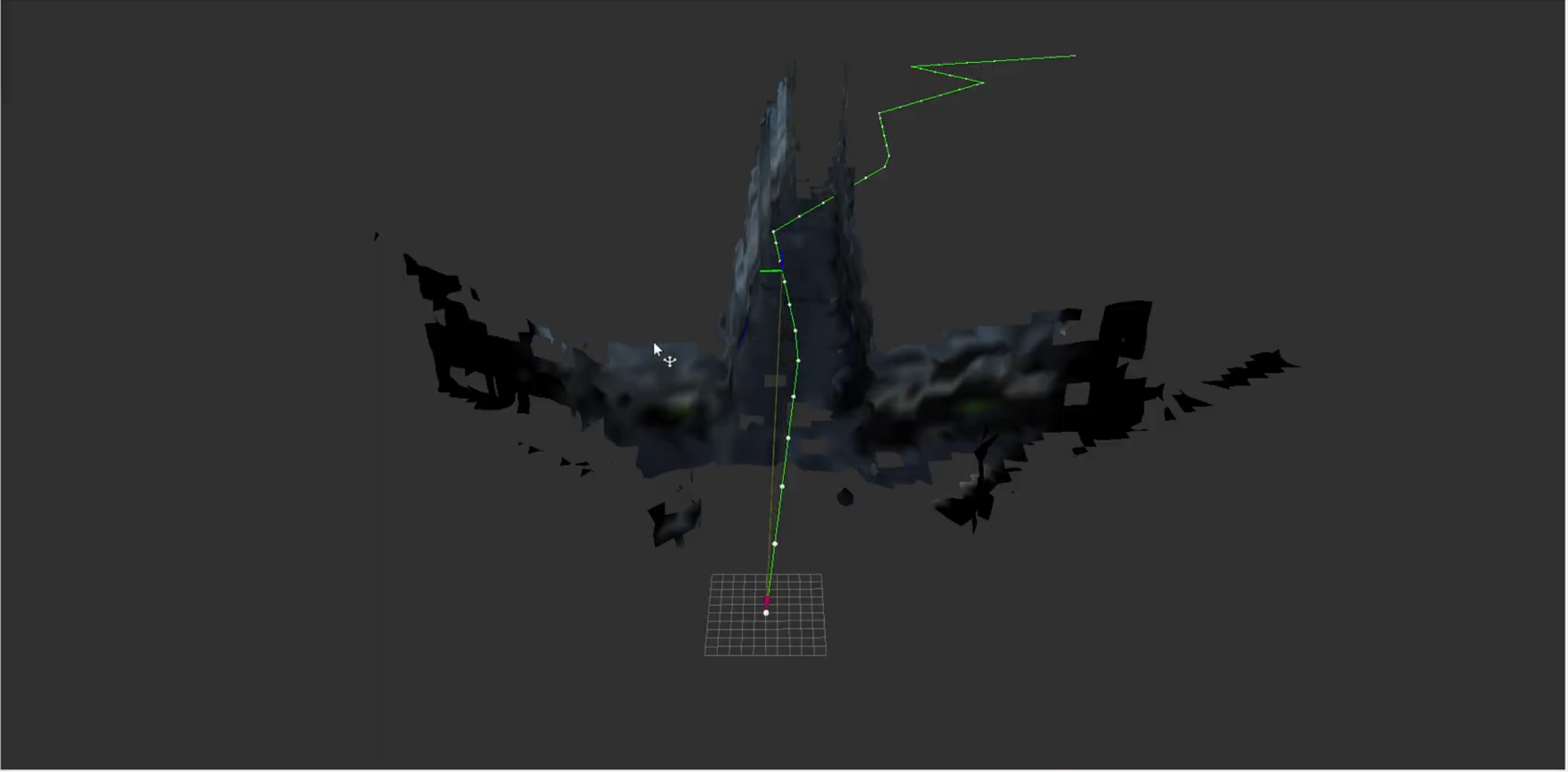
Built a closed-loop autonomy evaluation framework to quantify how LiDAR specifications impact drone navigation and replanning performance

Designed and implemented a scalable multi-agent UAV system using mesh networking for robust real-time coordination
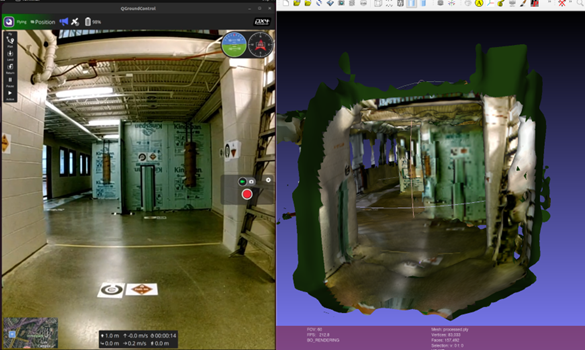
Implemented advanced 3D mapping using Gaussian Splatting for GPS-denied environments

Team project on using physics-informed reinforcement learning to recover racecars from loss of tire grip
IEEE-published vision-based system for remote and contactless shot group measurement with 91.8% accuracy
Professional career history
📍 West Lafayette, IN, U.S.A.
📍 Seoul, South Korea
📍 Seoul, South Korea
📍 Poway, CA, U.S.A.
Academic background
M.S. in Electrical and Computer Engineering
B.E. in Computer Science and Engineering
Research papers and articles
Dongheon Lee, et al.
IEEE Sensors Applications Symposium (SAS) • 2022
Dongheon Lee, et al.
Korean Institute of Information Scientists and Engineers (KIICE) • 2021
Recognition and achievements
Dean, College of Engineering, CNU
Recognized for outstanding academic and research achievements
2022 Software Talent Competition, IITP Korea
Awarded by competition sponsor for excellence
KIICE Poster Session
For poster presentation on mobile application testing
Sejong City Foundation
Foundation scholarship for academic achievement
Department of CSE, CNU
Academic excellence award for 4 semesters
Department of CSE, CNU
Academic excellence award for 3 semesters